|
Changwoo Yoo I'm an undergraduate student at Korea University in Seoul, Korea. I'm currently working at Yonsei RLLAB advised by Prof. Youngwoon Lee. Before joining Yonsei RLLAB, I focused on the reinforcement learning theory and multi-armed bandit algorithms at RILAB advised by Prof. Kyungjae Lee |

|
ResearchMy research goal is to develop generalizable robots using deep reinforcement learning. Toward this goal, I am interested in the robotics with language prior, skill-based RL, video pretraining and world models. |
|
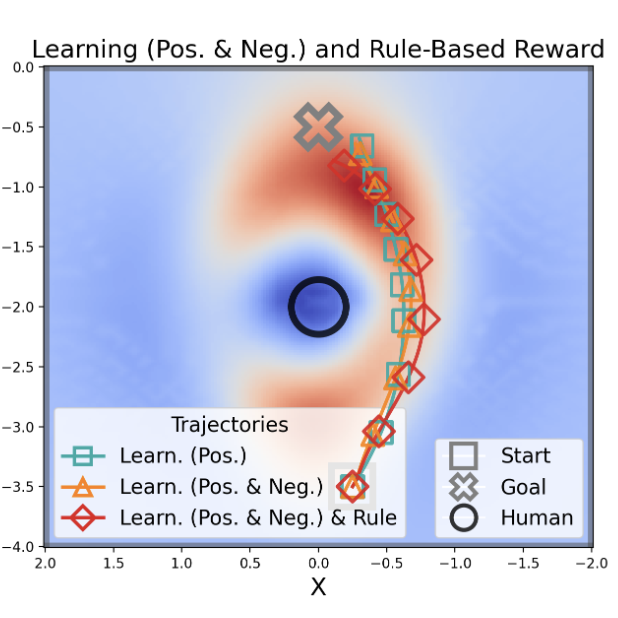
Learning Social Navigation from Positive and Negative Demonstrations and Rule-Based Specifications
Chanwoo Kim, Jihwan Yoon, Hyeonseong Kim, Taemoon Jeong, Changwoo Yoo, Seungbeen Lee, Soohwan Byeon, Hoon Chung, Matthew Pan, Jean Oh, Kyungjae Lee, Sungjoon Choi Under Review, 2025 project page / arXiv Learning a density-based reward from positive and negative demonstrations augmented with rule-based safety constraints to balance adaptability and reliability. |
|
|